Si la
détection d’un véhicule arrêté semble la
plus simple, il faut toutefois analyser plus en détail
l’incident.
En pratique,
l’automobiliste qui va s’arrêter commence par
ralentir puis s’arrête. Or, le système de DAI ne
devra pas pour autant déclencher une alarme dans tous les cas.
Une fois le véhicule arrêté, il faudra
déterminer s’il s’agit d’un arrêt
fugitif, donc suivi d’un redémarrage dans les quelques
secondes qui suivent, ou si il s'agit réellement d'un
arrêt prolongé. Donc une temporisation sur le
déclenchement de l’alarme est ainsi nécessaire.
Dans la pratique, l’incident correspond à l’alarme
« véhicule arrêté depuis au moins xx
secondes » où la valeur xx devra pouvoir être
paramétrée.
Toutefois, il ne
faut pas oublier que le résultat de cette alarme est obtenu
par l'application d'un algorithme sur des données analogiques.
Donc, la détection n'est pas une grandeur discrète mais
obéit à des lois statistiques. Des études,
menées en particulier par la société TRAFICON,
montre que la détection d'un véhicule répond à
des lois se rapprochant de distributions gaussiennes en fonction
des paramètres liés à la caméra et à
l'implantation de l'incident.
Les courbes
suivantes présentent les résultats
obtenus.
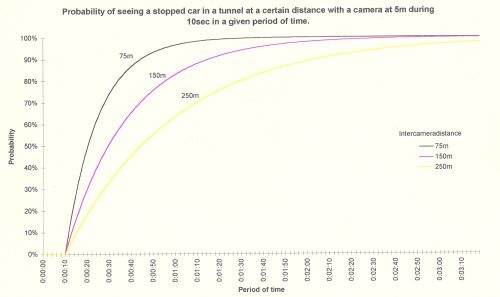
Ce premier ensemble de courbes donne la
probabilité de détecter un véhicule arrêté
pendant 10 secondes en fonction du temps de traitement de
l'algorithme pour une caméra disposé à 5 m de
hauteur. Les courbes correspondent à une interdistance entre
les caméras de 75, 150 ou 250 m. les conclusions que l'on peut
tirer de l'analyse de ces courbes sont :
- plus l'interdistance entre les caméras
sera grande plus le temps de traitement est important
- pour une interdistance donnée, plus le
temps de traitement est important, plus la probabilité de
détection est importante.
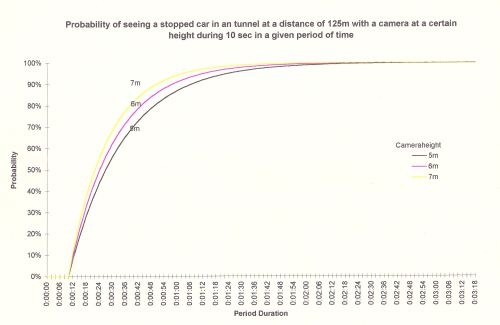
Cet ensemble de courbe donne la probabilité
de détecter un véhicule arrêté à 125 m de
la caméra, pendant 10 seconde en fonction de la hauteur de la
caméra, 5, 6 ou 7 m. L'analyse permet de conclure que plus la
hauteur est importante plus la probabilité augmente.
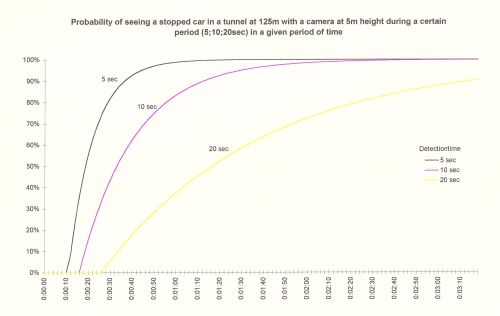
Cet ensemble de courbe donne la probabilité
de détecter un véhicule arrêté à 125 m de
la caméra, elle même située à 5 m de hauteur en
fonction du temps d'arrêt. L'analyse des courbes met en
évidence que plus le temps de détection est bref,
meilleur est la probabilité de détection.
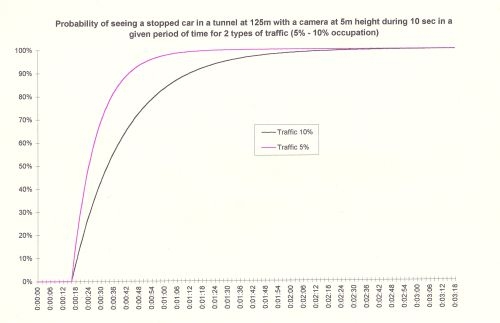
Cet ensemble de courbe donne la probabilité
de détecter un véhicule arrêté à 125 m de
la caméra pendant 10 seconde, la caméra étant
située à 5 m de hauteur en fonction de la densité du
trafic (10% et 5%). L'analyse met en évidence que plus le
trafic est faible meilleur est la probabilité de
détection.
Indéniablement, le résultat d'une
détection d'incident ne répond pas sous la forme d'une
fonction discrète mais peut-être assimilé à une
fonction normale ou Gaussienne. Il importe donc pour
caractériser cette fonction de donner la moyenne et
l'écart type. Or, dans les installations réalisées
jusqu'à ce jour, seule une valeur statistique de taux de
détection pouvait être indiqué au niveau des
performances attendues.
Les essais
ci-avant portent sur la probabilité de détection par
l'agorithme indépendamment de la situation spatiale de
l'incident relativement à la position de la caméra. Il
faut donc vérifier la possibilité de déterminer
plusieurs «zones» indépendantes de détection.
La représentation des zones de détection peut
s’effectuer suivant la figure 1 présenté au
paragraphe 3-2, où sont définies 5 zones différentes
:
• Zone 1 :
voie de circulation sens 1• Zone 2 : voie de circulation sens
2• Zones 3 et 4 : trottoirs et piédroits• Zone 5 :
Zone de recouvrement. Cette dernière zone correspond à
une section surveillée par la caméra suivante. Ces
possibilités permettent de définir des zones
particulières telles que les voies, les niches de
sécurité, les abris piétons,
etc.
Il importe de
connaître pour chaque système le nombre de zones
possibles ainsi que le nombre de « niveaux »
d’importance programmable. Pour chacun de ces niveaux, il
doit être possible de paramétrer :
• Le temps
de détection (Ton) : temps durant lequel le
phénomène doit subsister avant de déclencher une
alarme ;• Le temps d’affichage (Toff) : temps durant
lequel l’alarme continue à être affichée sur
le moniteur après sa détection.Ces deux temps (Ton et
Toff) doivent être indépendants pour chaque
zone.
Par ailleurs, il
faudra s’assurer qu’aucun véhicule en mouvement ne
viendra cacher le véhicule arrêté. On parle souvent
de « masquage » qu’il faut bien
différencier du masque précédemment évoqué
dans la définition des zones de détection. Ce masquage
peut être obtenu par le passage d’un ou plusieurs
camions devant le champ de la caméra. Ce phénomène
sera notamment influencé par la typologie de l’ouvrage
et la position de la caméra d’où l’importance
de l’étude de couverture évoquée
ci-avant.