Les travaux de Lee et R M Faure ont permit,
en 1992, la caractérisation de l'état de fissuration
d'une chaussée. De plus cette caractérisation ne
nécessite aucun essais en laboratoire et est
réalisée entièrement par traitement d'une image de
la chaussée, prise à distance régulière par un
appareil photo (ou une caméra) embarquée.
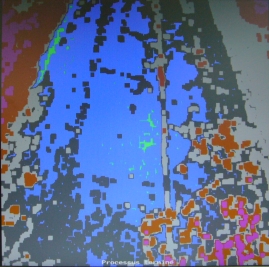
Ce traitement se déroule en quatre
étapes principales présentée ci-dessous. On part
d'une image photo initiale de la chaussée
Image initiale de la chaussée
Prémière étape : on
réalise trois opérations de fermeture successives ce qui
permet d'obtenir l'image ci-dessous. Il y a éléimination
des petits détails.
image obtenue après trois fermetures
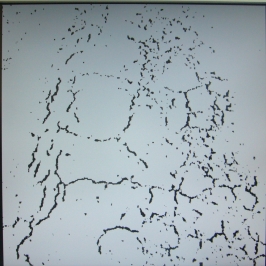
Deuxième étape : on soustrait
à l'image initiale l'image obtenue après les trois
fermetures. On obtient donc le réseau de fissures, qui
correspond aux petits détails (ou presque) sans avoir les
ombres d'objets (poteaux, fils, ) qu'une technique de
gradient ne peut éliminer.
image résultats de image initiale - image
obtenue après 3 fermetures
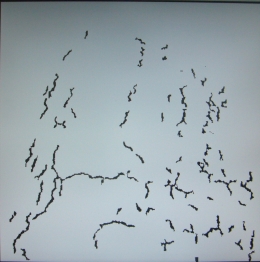
Troisième étape : on supprime
les petits objets, (ici de moins de 20 pixels) pour garder les
fissures de grand linéaire.
image après filtrage des petits
objets
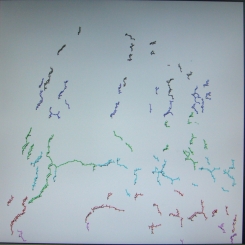
Quatrième partie : on réalise
une squelettisation de l'image des fissures
précédentes.
image après squelettisation
On compte le nombre de fissures, de ramifications
pour faire une classification des images de façon à
détecter les zones sans fissures, avec quelques fissures,
fissurées et très fissurées. Une restitution
cartographique permet d'identifier les zones où il faut
intervenir d'urgence.