Post-Traitements
Squelettisation
morphologique
Détection du squelette des formes noires par
morphologie mathématique (algorithme de Lantuéjoul,
1977).
Entrées/Sorties
Image
binaire >> Nouvelle image
binaire.
Méthode
On érode
l’image initiale. On stocke l’image puis on applique
une ouverture. Les résidus entre l’image
érodée et l’image érodée+ouverte, i.e.
les pixels de valeurs différentes, sont des points du
squelette. On procède ainsi par itération
jusqu’à ce que l’image d’érosions
successives soit vide.
- Rq - Ici, le
squelette d’une forme n’est pas connexe (ou
continu).
Squelettisation par
amincissement
Définition du squelette (en principe connexe)
des formes noires de l’image par amincissements
successifs.
Entrées/Sorties
Image
binaire >> Nouvelle image
binaire.
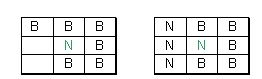
Méthode
On parcourt
l™image
jusqu™à ce
qu™aucune forme ne puisse
être amincie, c™est-à-dire lorsque
qu™aucun pixel ne se trouve
dans une situation de ce type (à 8 rotations près)
:
- Rq - Ici, le
squelette d’une forme noire est
continu.
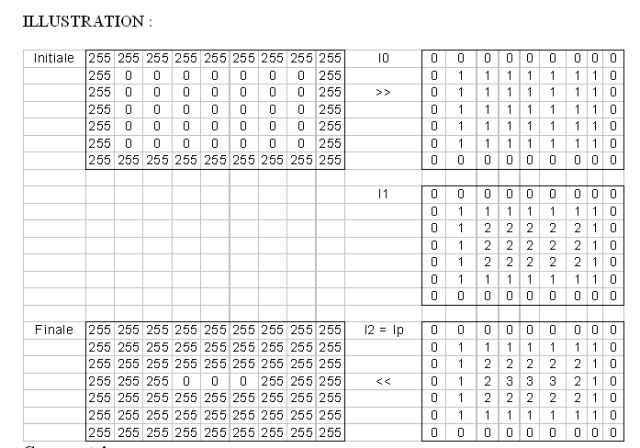
Axe
Médian
Détection du squelette d’une forme
noire selon l’algorithme de Rosenfeld-Kak (1 ou 2 pixels
d’épaisseur).
Entrées/Sorties
Image binaire
>> Nouvelle image binaire.
Méthode
Rosenfeld (A.), Kak (A.C.), Digital Image
Processing, Academic Press, Vol. 1 et 2, 1982.
On crée une image de travail, I0 telle
que :
I0(x) = 1 si le
pixel x vaut 0 dans image initiale.
I0(x) = 0 si le
pixel x vaut 255 dans l’image initiale.
On construit récursivement,
jusqu’à convergence, une suite d’image
(In) :
In(x) = I0(x)
+ min{ In-1(z)} pour zÎB(x,1)
On note p, le plus petit entier naturel tel
que In = Ip.
On définit M une partie de l’image
telle que :
M = {x
/ "zÎB(x,1)
Ip(x)³Ip(z)
}
Puis on applique la fonction discrète à
l’image : I(x) =
255*IndicatriceComplDeM(x)
Commentaires
Ici, le squelette
d’un squelette reste le
squelette.
Ebarbulage
Suppression des extrémités des
« branches » d’épaisseur 1
pixel.
Entrées/Sorties
Image binaire
>> Nouvelle image binaire.
Paramètres
zz : nombre de
pixels à supprimer.
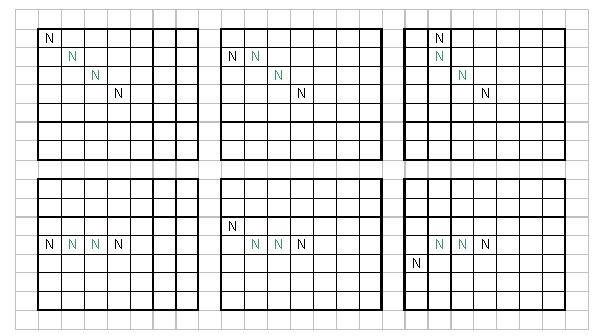
Méthode
Dans un premier temps, on détecte tous les
points extrêmes de l’image, i.e. on stocke les points
noirs ayant un des deux voisinages suivants (à 4
rotations près) puis on les efface.
Ensuite, pour chaque point trouvé, on
recherche dans ses voisins si l’un d’eux est
extrême.
Si un point est trouvé, il est stocké
puis effacé et on continue.
Sinon, cela signifie que la barbule est
entièrement stockée.
Enfin, le tableau de stockage est relu et les
barbules entièrement présentes seront effacées dans
l’image résultat.
Amincissement
Amincissement des formes noires par suppression
des points de bords.
Entrées/Sorties
Image binaire
>> Nouvelle image binaire.
Paramètres
zz :
épaisseur (en nombre de pixels) à
supprimer.
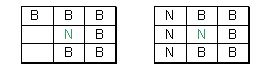
Méthode
On évalue le voisinage de chaque pixel de
l’image et il est mis en blanc dans les deux situations
suivantes (à 4 rotations près) :
Le parcours de l’image est effectué zz
fois, ainsi la forme noire est
« aminci ».
NB : Pour pouvoir étudier
l’ensemble de l’image avec le masque, on ajoute une
bordure blanche d’un pixel tout autour de
l’image.
Raccord : distance
d’un pixel
Les zones noires sont raccordées au sein
d’un masque 5x5.
Entrées/Sorties
Image binaire
>> Nouvelle image binaire.
Méthode
On évalue le voisinage 5x5 de chaque pixel de
l’image et si l’on se trouve dans une des 4 situations
suivantes (à rotations de p/2 près) on
raccorde les pixels noirs.
Raccord : distance de
2 pixels
Les zones noires sont raccordées au sein de
masque 7x7.
Entrées/Sorties
Image binaire
>> Nouvelle image binaire.
Méthode
On évalue le voisinage 7x7 de chaque pixel de
l’image et si l’on se trouve dans une des 6 situations
suivantes (à rotations près), on raccorde les pixels
noirs.
Raccord des points
extrêmes
Les points extrêmes sont désignés,
puis s’ils se trouvent à une distance moindre que celle
fixée en paramètre, un chemin est créé pour les
relier.
Entrées/Sorties
Image binaire
>> Nouvelle image binaire.
Paramètres
zz : distance
maximum pour laquelle deux points extrêmes sont
reliés
Méthode
Dans un premier temps, on détecte tous les
points extrêmes de l’image. Ils vérifient les
situations suivantes (à 4 rotations
près) :
On connecte ensuite les points qui sont distants
de moins de zz pixels par un chemin (diagonal puis
horizontal).
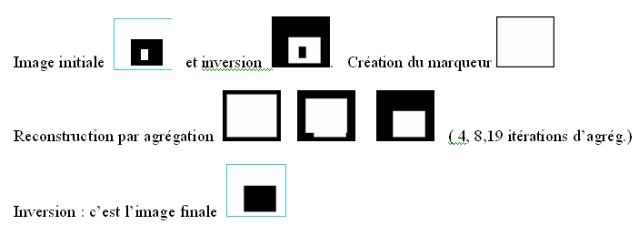
Fermeture des
trous
Les trous des formes noires sont bouchés par
méthode d’agrégation.
Entrées/Sorties
Image binaire
>> Nouvelle image binaire
Méthodes
On inverse l’image. Les trous forment
maintenant des formes noires.
On crée l’image des marqueurs :
image blanche à l’exception des bords qui sont
noirs.
On construit maintenant l’image des
marqueurs par agrégations successives jusqu’à ce
que l’on ne puisse plus agrégé de pixels. Une
agrégation respecte les critères
suivants :
Pour chaque pixel
du marqueur
SI le pixel est
blanc et a un voisin noir
ET SI le
même pixel dans l’image source est
noir
ALORS le pixel du
marqueur devient noir
Ainsi, les formes noires (les trous en fait) ne
peuvent pas être atteinte par la
reconstruction.
L’inversion nous donne donc une image
où les « trous » de départ sont
inexistants.
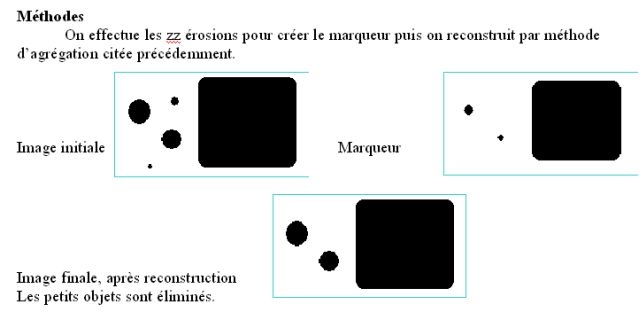
Elimination des objets par
érosions
Des zones de pixels disparaissent par
érosions successives.
Entrées/Sorties
Image binaire
>> Nouvelle image binaire
Paramètres
zz : nombre
d’érosion à effectuer (érosion par
élément carré 3x3).
Méthodes
On effectue les zz
érosions pour créer le marqueur puis on reconstruit par
méthode d’agrégation citée
précédemment.
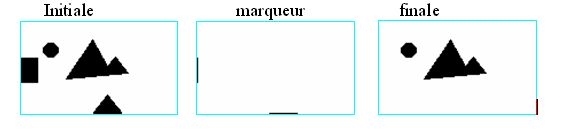
Elimination des objets
selon leur taille
Elimination des formes ayant moins de zz
pixels.
Entrées/Sorties
Image binaire
>> Nouvelle image binaire.
Paramètres
zz : nombre
maximum de pixels des formes que l’on doit
supprimer.
Méthodes
On parcourt l’image. Dès qu’on
trouve un pixel noir, on construit une pile qui contiendra tous les
voisins noirs de ce pixel. On stocke ainsi tous les pixels noirs
appartenant à la forme. Si le nombre de pixels est
inférieur à zz, les pixels sont mis en blanc, sinon on
continue le parcours.
NB : Les pixels des formes noires sont
entièrement stockés en liste ce qui peut provoquer des
débordements de capacité.
Elimination des objets sur
le bord
Elimination des formes qui touchent le bord de
l’image.
Entrées/Sorties
Image binaire
>> Nouvelle image binaire.
Méthodes
On réalise un
marqueur des bords puis on l’intersecte avec l’image
initiale. On reconstruit ensuite les formes marquées (celles
du bord) puis on effectue un résidu entre l’image
initiale et l’image contenant les objets du
bord.